Architecture
MERLIN2, which comes from MachinEd Ros 2 pLannINg, is a software architecture that represents the paradigm of a hybrid cognitive architecture for robots composed of four layers. It is the evolution of MERLIN. MERLIN2 aims to speed up the process of producing robot behaviors to face the daily short and long-term tasks of a service robot using ROS 2.
On the one hand, it also includes a component for knowledge managing, a tool called KANT (Knowledge mAnagemeNT), which allows querying, creation, and edit deletion of PDDL-based knowledge. On the other hand, it includes a component for behavior generation and manipulation called YASMIN (Yet Another State MachINe). YASMIN is a library to develop robot behaviors using state machines. Each of those state machines uses a blackboard to share data between all the states and nested state machines. Thus, the current organization and development of MERLIN2 components and solutions are bioinspired.
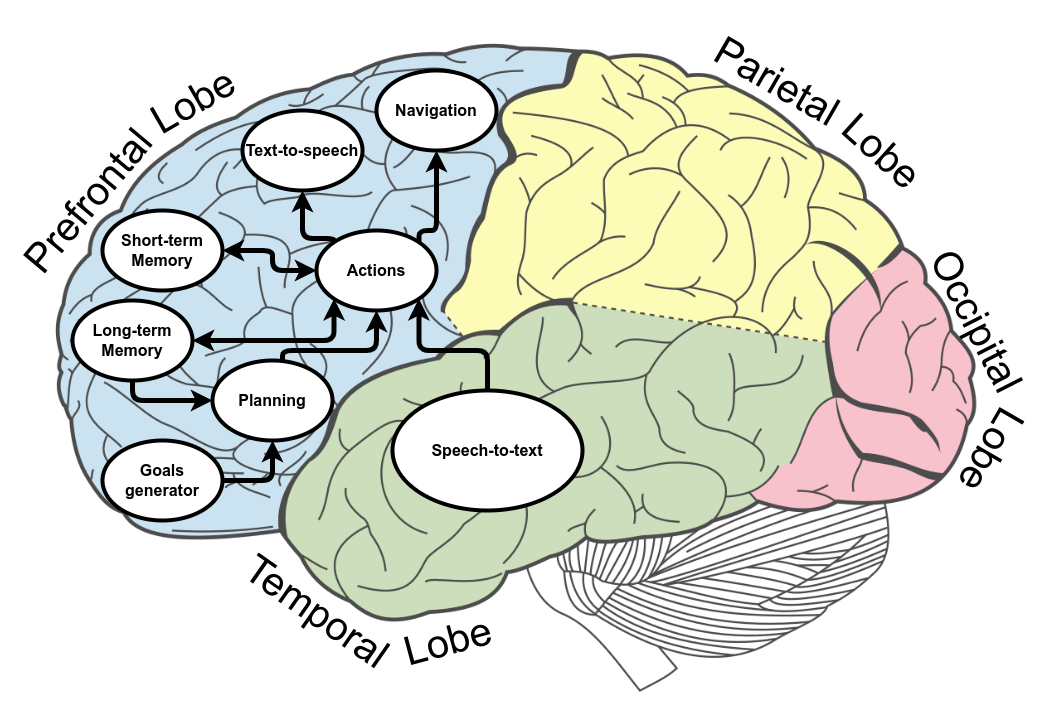
In nature, cognitive functions such as short memory, perception or sensory-motor; are performed by some cerebrum lobes of the human brain. Organizing MERLIN2 components as cerebrum cognitive functions gave us the sketch presented in the following image. The human cerebrum is composed of four structures called prefrontal, temporal, occipital and parietal. The prefrontal lobe has most of the modules from MERLIN2. It is in charge of memory, which is divided into long-term and short-term. The long-term memory, which represents the state of the environment, corresponds with the knowledge base managed by KANT. The short-term memory corresponds with the blackboards of the state machines of YASMIN. Besides, long-term memory is used in the planning process to choose the actions that the robot has to use to achieve its goals. These actions are implemented with YASMIN state machines and can also manage the knowledge of long-term memory. Finally, actions can use the navigation, text-to-speech and speech-to-text modules to interact with the environment and humans. The prefrontal lobe is also in charge of motor control, navigation, and speech production, text-to-speech; while the temporal lobe is in charge of the audio processing, speech-to-text.
When moving all these cognitive functions to a classic software perspective we find the folowing diagram. The figure presents in detail the MERLIN2 architecture technically divided into four layers associated with hybrid and multi-layer cognitive proposals.
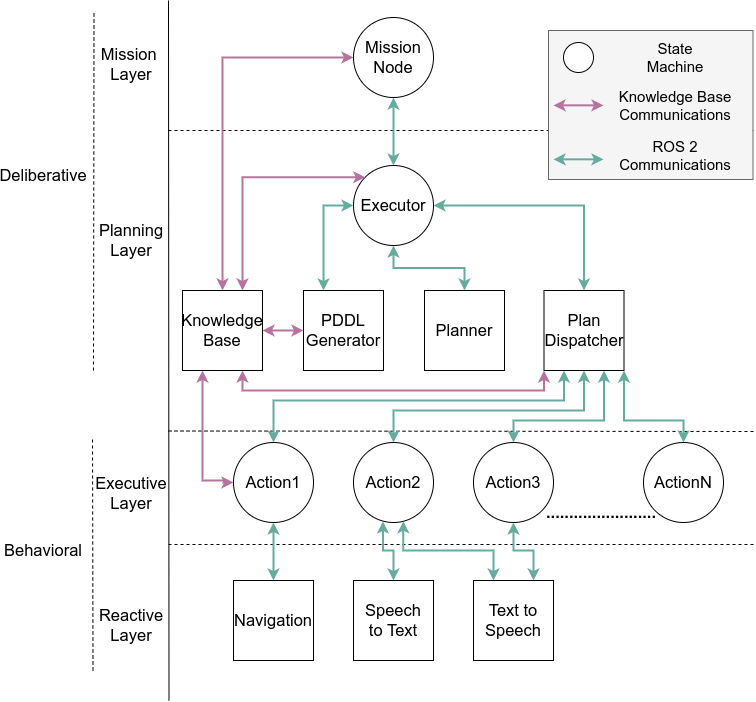
Mission Layer
This layer is in charge of generating the high-level goals of the robots. These goals are related to robot duty, particular works that are internally or externally motivated, which means that are bred from the proprioceptive or exteroceptive stimulus (low battery status or human request).
The software component at this layer sets the goals of the robot in a given instant. That goal starts from an initial state made of current environment facts and sets the facts that the robots want to be true.
Planning Layer
This layer is in charge of generating plans to achieve high-level goals previously created. It is associated with the classic Deliberative subsystem and requires formal representation of the environment, plan solvers, task dispatcher, and execution.
MERLIN2 proposes a set of five components for this layer:
Knowledge Base: this component is the knowledge base of KANT, which corresponds with long-term memory. It stores the knowledge of the environment. There are two types of knowledge base depending on the storage type: a ROS 2 node that stores in process memory the knowledge and a MongoDB database, which is more persistent.
PDDL Generator: this component is in charge of generating the PDDL text from the knowledge base.
Planner: this component uses the PDDL text to create plans. Several PDDL planners can be used. The available planners are POPF, SMTP, unified-planning and VHPOP.
Plan Dispatcher: this component is in charge of executing the actions of the generated plan. It also has to cancel the current action if needed.
Executor: this component is a facade between this layer and the Mission Layer. It executed its component of this layer and cancel the Plan Dispatcher.
Executive Layer
This layer is composed of the actions that the robot can carry out. These actions compose the plans generated by the Planning Layer.
When an action is instantiated, its associated knowledge is saved in the knowledge base. Besides, these actions are implemented as YASMIN state machines. As has been mentioned before, the blackboard of the state machines is the short-term memory, that stores the initial objects needed by the PDDL action and the partial solution of the state machine. Besides, YASMIN has a viewer that can be used to monitor the actions at a high level. Finally, new actions can be developed so that the robot can perform other tasks. As a result, more complex behaviors can be implemented.
Reactive Layer
This layer provides the set of software components that bring bounded and specific applications that would be considered robot skills such as navigation (world exploration), text-to-speech (talking) or sound recognition (listening).
This version of MERLIN2 includes three specific components that are suitable for validating the use of the cognitive architecture:
Navigation: this component corresponds with Nav2, which is the navigation system of ROS 2.
Speech-to-text: this component is in charge of listening for speech and converting it to text.
Text-to-speech: this component is in charge of producing speech from a sentence.